Tipo:
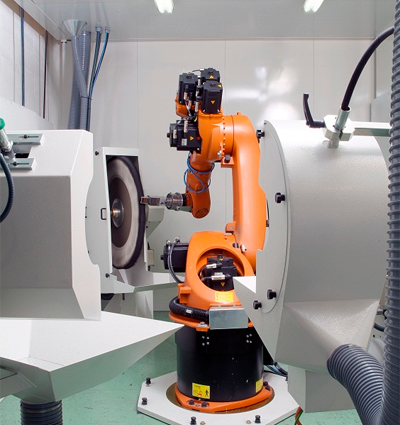
Celda robotizada con un solo robot.
Sector:
Biomédico.
Función:
Lijado y pulido de prótesis de titanio.
Notas:
Celda robotizada con un solo robot para procesar prótesis de titanio.
La máquina incluye un robot ABB, variadores de velocidad comunicados mediante CANOpen, Conexión al PLC de control mediante DEVICENET.
Las trayectorias que el robot describe son muy complejas ya que tienen que seguir la forma de la pieza a velocidad constante manteniendo la presión constante contra las herramientas de trabajo evitando a la vez un calentamiento del material.

Tipo:
Celda robotizada con un solo robot.
Sector:
Audio de lujo.
Función:
Pulido de piezas de audio de lujo.
Notas:
Celda robotizada con un solo robot para pulido de componentes de sistemas de audio de lujo.
La máquina incluye un robot KUKA, servomotores y servoamplificadores conectados mediante EtherCAT, variadores de velocidad comunicados mediante CANOpen, Conexión al PLC de control mediante DEVICENET.
Les trayectorias que el robot describe son muy complejas ya que deben seguir la forma de la pieza a velocidad constante manteniendo la presión constante contra las herramientas de trabajo.
Tipo:
Celda robotizada de dos robots trabajando conjuntamente.
Sector:
Automoción
Función:
Lijar y pulir piezas del sector del automóvil.
Notas:
Celda robotizada con dos robots trabajando conjuntamente para lijar piezas para el sector del automóvil.
La máquina incluye dos robots ABB, variadores de velocidad comunicados mediante CANOpen, Conexión al PLC de control mediante DEVICENET.
Se garantiza en todo momento que los dos robots que actúan en áreas comunes no podrán colisionar nunca.


Tipo:
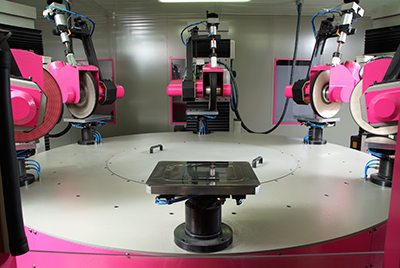
Celda robotizada con cuatro robots trabajando conjuntamente.
Sector:
Grifería.
Función:
Lijado y pulido de grifos.
Notas:
Celda robotizada con cuatro robots en una disposición especial trabajando para lijar y pulir grifos.
La máquina incluye cuatro robots ABB, Conexión al PLC de control mediante DEVICENET.
Los robots se calibran para obtener procesos idénticos entre ellos programando un solo robot.
Tipo:
Máquina con 26 ejes CNC y múltiples canales de interpolación.
Sector:
Joyería de regalo.
Función:
Pulir marcos de fotografía y joyas para regalo.
Notas:
Máquina con 26 ejes de CNC, 5 canales de interpolación y cambios de grupos de interpolación en tiempo de ejecución.
La máquina incluye 26 servomotores y servoamplificadores conectados mediante EtherCAT, variadores de frecuencia conectados mediante CANOpen, periferia distribuida, PC de control, SoftCNC y SoftPLC.
PLC de seguridades.
Tipo:
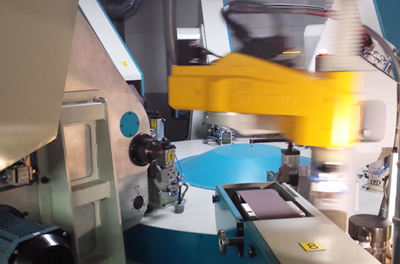
Máquina con 12 ejes CNC, múltiples canales de interpolación y robot SCARA.
Sector:
Industria general.
Función:
Lijado de piezas de aluminio.
Notas:
Máquina con 12 ejes CNC, 6 canales de interpolación, visión artificial y robot SCARA Staübli para carga automática.
La máquina incluye un robot Staübli, servomotores y servoamplificadores comunicados mediante EtherCAT, Conexión al PLC de control mediante EtherCAT.
Visión artificial para corregir la posición de recogida del robot.
Tipo:
Celda robotizada de dos robots trabajando conjuntamente.
Sector:
Audio de lujo.
Función:
Pulido de piezas de audio de lujo.
Notas:
Celda robotizada con dos robots trabajando conjuntamente en sincronía de trayectoria.
La máquina incluye dos robots KUKA, servomotor y servoamplificadors con tecnología de un solo cable comunicados mediante EtherCAT, Connexión al PLC de control mediante EtherCAT.
Un robot carga la pieza y el otro robot carga la herramienta para poder realizar las complejas trayectorias.

| Trabajamos duro hasta la excelencia y lo hacemos para usted |