Tipus:
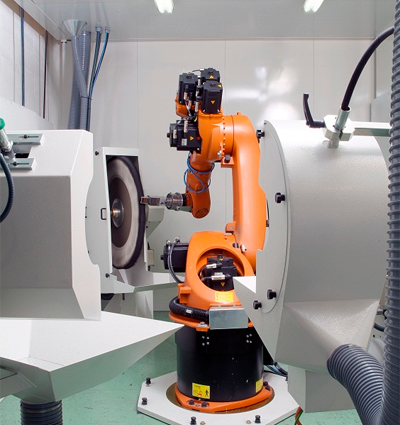
Cel·la robotitzada d'un sol robot.
Sector:
Biomèdic.
Funció:
LLimar i polir pròtesis de titani.
Notes:
Cel·la robotitzada amb un sol robot per processar pròtesis de titani.
La màquina inclou un robot ABB, variadors de velocitat comunicats mitjançant CANOpen, Connexió al PLC de control mitjançant DEVICENET.
Les trajectòries que el robot descriu són molt complexes ja que han de resseguir la forma de la peça a velocitat constant mantenint la pressió constant contra les eines de treball evitant a la vegada un escalfament del material.

Tipus:
Cel·la robotitzada d'un sol robot.
Sector:
Àudio de luxe.
Funció:
Polir parts de sistemes d’àudio de luxe.
Notes:
Cel·la robotitzada amb un sol robot per polir components de sistemes d’àudio de luxe.
La màquina inclou un robot KUKA, servomotors i servoamplificadors connectats mitjançant EtherCAT, variadors de velocitat comunicats mitjançant CANOpen, Connexió al PLC de control mitjançant DEVICENET.
Les trajectòries que el robot descriu són molt complexes ja que han de resseguir la forma de la peça a velocitat constant mantenint la pressió constant contra les eines de treball.
Tipus:
Cel·la robotitzada de dos robots treballant conjuntament.
Sector:
Automoció
Funció:
Llimar i polir peces del sector de l'automòbil.
Notes:
Cel·la robotitzada amb dos robots treballant conjuntament per llimar peces pel sector de l'automòbil.
La màquina inclou dos robots ABB, variadors de velocitat comunicats mitjançant CANOpen, Connexió al PLC de control mitjançant DEVICENET.
Es garanteix en tot moment que els dos robots, que actuen en àrees comunes no podran col·lisionar mai.


Tipus:
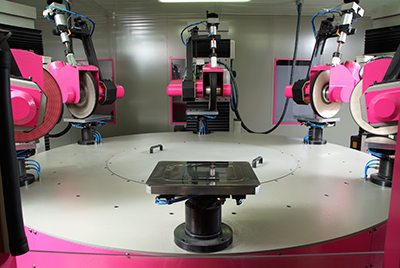
Cel·la robotitzada amb quatre robots treballant conjuntament.
Sector:
Griferia.
Funció:
Llimar i polir aixetes.
Notes:
Cel·la robotitzada amb quatre robots en una disposició especial treballant per llimar i polir aixetes.
La màquina inclou quatre robots ABB, Connexió al PLC de control mitjançant DEVICENET.
Els robots es calibren per obtenir processos idèntics entre ells tot hi només programar un sol robot.
Tipus:
Màquina amb 26 eixos CNC i múltiples canals de interpolació.
Sector:
Joieria de regal.
Funció:
Polir marcs de fotografia i joies per regal.
Notes:
Màquina amb 26 eixos de CNC, 5 canals d'interpolació i canvis de grups d'interpolació en temps d'execució.
La màquina inclou 26 servomotors i servoamplificadors connectats mitjançant EtherCAT, variadors de freqüència connectats mitjançant CANOpen, perifèria distribuïda, PC de control, SoftCNC i SoftPLC.
PLC de seguretats.
Tipus:
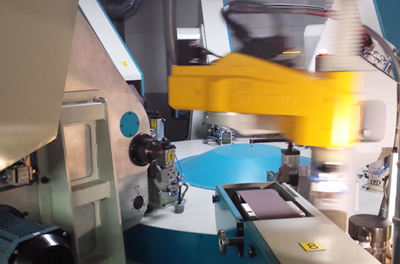
Màquina amb 12 eixos CNC, múltiples canals de interpolació i robot SCARA.
Sector:
Indústria general.
Funció:
Llimar peces d’alumini.
Notes:
Màquina amb 12 eixos de CNC, 6 canals de interpolació, visió artificial i robot SCARA Staübli per càrrega automàtica.
La màquina inclou un robot Staübli, servomotors i servoamplificadors comunicats mitjançant EtherCAT, Connexió al PLC de control mitjançant EtherCAT.
Visió artificial per corregir la posició d'agafada del robot.
Tipus:
Cel·la robotitzada de dos robots treballant conjuntament.
Sector:
Àudio de luxe.
Funció:
Polir parts de sistemes d’àudio de luxe.
Notes:
Cel·la robotitzada amb dos robots treballant conjuntament en sincronia de trajectòria.
La màquina inclou dos robots KUKA, servomotor i servoamplificadors amb tecnologia d'un sol cable comunicats mitjançant EtherCAT, Connexió al PLC de control mitjançant EtherCAT.
Un robot porta la peça i l’altre porta l'eina per poder assolir la complexitat de les trajectòries.

| Treballem dur fins l’excel·lència i ho fem per vostè |
